linux 快速部署教程
小白警告
如果你选择使用Linux,请确保你有一定的Linux使用经验,能够自行解决可能遇到的问题。 否则推荐使用Windows系统进行部署。
1. 安装机器人本体
执行完成机器人本体部署脚本后,请前往安装目录/start,执行./gui.sh启动机器人管理界面。
onebot安装
机器人脚本只是负责安装机器人本体,你需要参考下面教程安装onebot实现机器人与平台对接。
2. 安装onebot
onebot实现 市面上较多请自行选择。本教程和机器人项目不对任何onebot实现负责。 本文只针对Napcat进行说明,如果你是使用其他onebot请参考对应教程。
这里有一份更详细的教程可供参考
这里给出一些onebot的安装地址:
稳定方案 | docker文件夹映射
经实测,目前最稳定的是docker napcat
如果Eridanus被安装在了napcat所在容器外(不建议在napcat所在容器内安装Eridanus,会很麻烦),将导致napcat找不到Eridanus要发送的文件资源。此时我们需要在部署napcat时增加文件夹映射。
docker run -d \
-e NAPCAT_GID=$(id -g) \
-e NAPCAT_UID=$(id -u) \
-p 3000:3000 \
-p 3001:3001 \
-p 6099:6099 \
-v /root/Eridanus/data:/root/Eridanus/data \
--name napcat \
--restart=always \
mlikiowa/napcat-docker:latest我们加上了-v /root/Eridanus/data:/root/Eridanus/data \参数,笔者的Eridanus安装在/root/Eridanus,你需要根据你的Eridanus实际安装位置进行调整。仅映射data文件夹即可。
3. 配置onebot
以Napcat为例,假设你已经安装好了Napcat。
请进入你的onebot的配置界面。
1. 新建配置
根据图片所示,新建一个WebSocket服务器配置

2. 配置参数
根据图片所示,填写参数。 
Token
请保留 Token 中填写的内容,后续需要用到。
3. 配置Eridanus
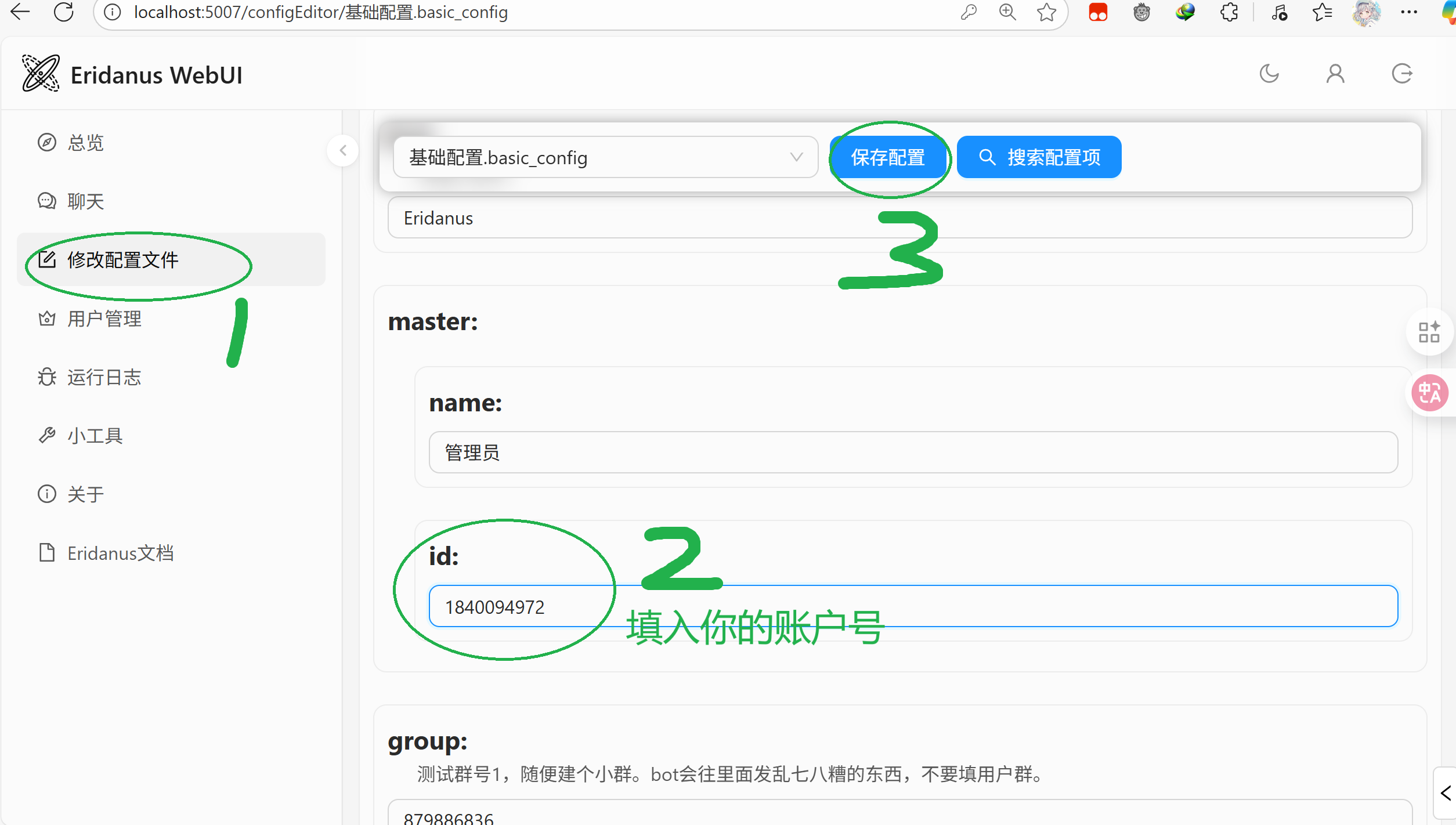
配置管理员账户
在启动Eridanus机器人后,在机器人的日志中你可以看到webui的地址和账户密码
在浏览器中访问webui,输入账户密码登录。
然后根据图片所示进入设置界面修改机器人的管理员账户。
配置OneBot连接
找到ws_link这一配置选项,填写你的onebot的WebSocket地址和Token 例如:
ws://127.0.0.1:3001?access_token={aMCj...}{aMCj...}需要替换为你实际填写的Token。

4. 重启机器人
点击保存之后,重启机器人。您可以在你的管理员账户中看到机器人主动发送的消息,表示连接成功。
至此机器人已经全部部署完成。
安全配置项
安全配置不是部署部分,但强烈建议配置以保障机器人和服务器的安全。
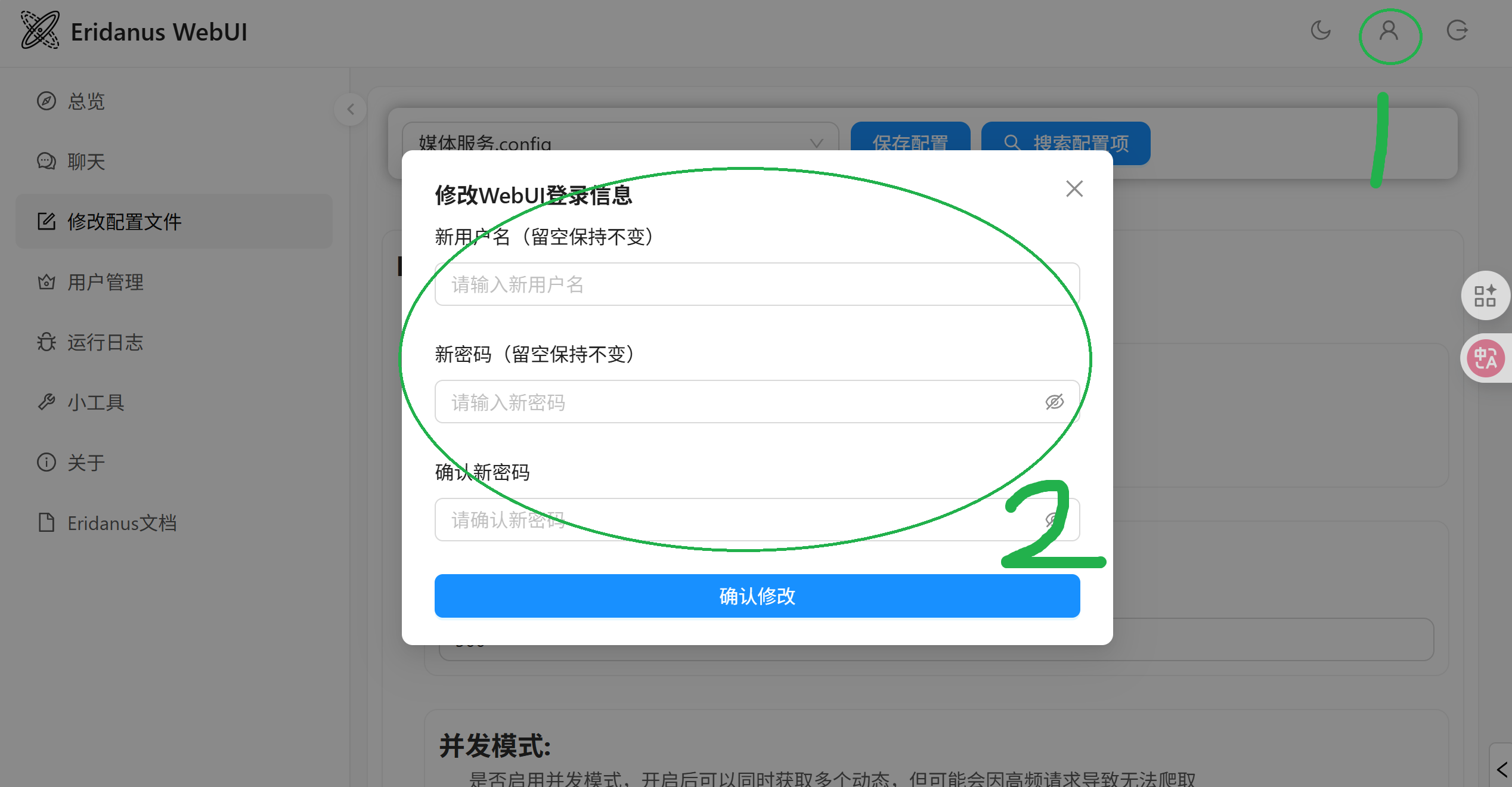
1. 修改webui默认管理员账户密码
2. 修改onebot的默认端口
请参考对应onebot的教程修改默认端口,然后把Eridanus中的ws_link配置项也一并修改。
防止端口扫描导致的安全问题。
更进一步如果你的机器人和onebot不在同一台服务器上,可以考虑把onebot的端口只允许机器人服务器访问本地访问。